Использование лазерных сканирующих 3D дальномеров для классификации рабочей зоны автономных транспортных средств и мобильных роботов
В настоящее время во всем мире наблюдается быстрое развитие беспилотных транспортных систем. Все более востребованными становятся мобильные робототехнические комплексы, способные перемещаться в автоматическом режиме в заранее неизвестных средах с препятствиями. Исследования в области автодвижения ведутся как в России, так и за рубежом. Наиболее известные компании-разработчики: Tesla, General Motors, Volkswagen, Audi, BMW, Volvo, Nissan, Google, Яндекс, ПАО «КАМАЗ», НПО СтарЛайн, Cognitive Technologies.
Одной из наиболее сложных задач, возникающих при разработке систем автодвижения, является классификация рабочей зоны мобильного робота. По результатам классификации строится локальная карта местности, с помощью которой, затем, осуществляется планирование траектории движения транспортного средства.
За последнее десятилетие учеными проведено множество исследований в данной предметной области. В некоторых случаях для выполнения классификации использовалось видеоизображение местности, окружающей транспортное средство, как основной источник информации о рабочей зоне. Но такой подход, как правило, не позволяет получить требуемые точность, надежность и производительность. Поэтому, в большинстве работ визуальная информация комплексируется с данными какой-либо другой природы (например, с тепловизорной или аудиоинформацией) или является вспомогательной.
В настоящее время наиболее перспективным направлением считается анализ трехмерного облака точек рабочей зоны, полученного с помощью лазерного сканирующего дальномера или системы стереозрения.
Преимуществом лазерных дальномеров, особенно по сравнению с видеокамерами, является отсутствие зависимости от внешних источников света, что обеспечивает возможность работы в любое время суток и года. Таким образом, лазерные дальномеры сегодня стали стандартным оборудованием для создания систем управления мобильными роботами. Они позволяют получить информацию о рабочей зоне, достаточную для определения проходимости и построения траектории в целевую точку.
Наибольшую сложность представляет классификация недетерминированных динамически изменяющихся сред. Изменение среды обусловлено таким факторами, как: время года и суток, метеорологические условия, особенности ландшафта, наличие различных статических и динамических объектов (здания, машины, люди и т.п.). Необходимо обеспечить устойчивость методов классификации по отношению к перечисленным факторам. Наиболее устойчивыми являются методы, основанные на анализе трехмерного облака точек рабочей зоны. Такое облако может быть получено, например, с помощью трехмерного сканирующего лазерного дальномера или системы стереозрения.
Построение локальной карты рабочей зоны напрямую связано с классификацией поверхности движения робота. Локальная карта представляет собой цифровое описание рабочей среды с определением зон, в которых робот может безопасно двигаться с заданной скоростью.
Результаты классификации рабочей зоны робота сохраняются в виде сетчатой карты локальной проходимости. В каждую клетку (ячейку) такой карты записывается число, которое характеризует проходимость участка рабочей зоны, ограниченного данной ячейкой.
Каждое измерение датчика представляет собой трехмерное облако точек (рисунок 1), анализ которого позволяет классифицировать рабочую зону мобильного робота. Точки трехмерного облака проецируются на горизонтальную плоскость. При этом каждая спроецированная точка принадлежит одной из ячеек локальной карты. Далее каждая ячейка классифицируется с помощью специального набора признаков.
Одной из наиболее сложных задач, возникающих при разработке систем автодвижения, является классификация рабочей зоны мобильного робота. По результатам классификации строится локальная карта местности, с помощью которой, затем, осуществляется планирование траектории движения транспортного средства.
За последнее десятилетие учеными проведено множество исследований в данной предметной области. В некоторых случаях для выполнения классификации использовалось видеоизображение местности, окружающей транспортное средство, как основной источник информации о рабочей зоне. Но такой подход, как правило, не позволяет получить требуемые точность, надежность и производительность. Поэтому, в большинстве работ визуальная информация комплексируется с данными какой-либо другой природы (например, с тепловизорной или аудиоинформацией) или является вспомогательной.
В настоящее время наиболее перспективным направлением считается анализ трехмерного облака точек рабочей зоны, полученного с помощью лазерного сканирующего дальномера или системы стереозрения.
Преимуществом лазерных дальномеров, особенно по сравнению с видеокамерами, является отсутствие зависимости от внешних источников света, что обеспечивает возможность работы в любое время суток и года. Таким образом, лазерные дальномеры сегодня стали стандартным оборудованием для создания систем управления мобильными роботами. Они позволяют получить информацию о рабочей зоне, достаточную для определения проходимости и построения траектории в целевую точку.
Наибольшую сложность представляет классификация недетерминированных динамически изменяющихся сред. Изменение среды обусловлено таким факторами, как: время года и суток, метеорологические условия, особенности ландшафта, наличие различных статических и динамических объектов (здания, машины, люди и т.п.). Необходимо обеспечить устойчивость методов классификации по отношению к перечисленным факторам. Наиболее устойчивыми являются методы, основанные на анализе трехмерного облака точек рабочей зоны. Такое облако может быть получено, например, с помощью трехмерного сканирующего лазерного дальномера или системы стереозрения.
Построение локальной карты рабочей зоны напрямую связано с классификацией поверхности движения робота. Локальная карта представляет собой цифровое описание рабочей среды с определением зон, в которых робот может безопасно двигаться с заданной скоростью.
Результаты классификации рабочей зоны робота сохраняются в виде сетчатой карты локальной проходимости. В каждую клетку (ячейку) такой карты записывается число, которое характеризует проходимость участка рабочей зоны, ограниченного данной ячейкой.
Каждое измерение датчика представляет собой трехмерное облако точек (рисунок 1), анализ которого позволяет классифицировать рабочую зону мобильного робота. Точки трехмерного облака проецируются на горизонтальную плоскость. При этом каждая спроецированная точка принадлежит одной из ячеек локальной карты. Далее каждая ячейка классифицируется с помощью специального набора признаков.

В зависимости от области применения транспортного средства классификация его рабочей зоны может проводится по различным классам, например: «Ровная поверхность», «Малая неровность», «Большая неровность» и «Препятствие». Для каждого класса задаются соответствующие диапазоны значений классификационных признаков. В результате такой классификации каждой ячейке локальной карты присваивается один из этих четырех классов. В зависимости от номера класса каждой ячейке назначается число в заданном диапазоне (предположим, от 0 до 100), которое характеризует проходимость поверхности движения внутри данной ячейки (показатель проходимости). Чем меньше это число, тем выше проходимость. Например, для класса «Ровная поверхность» показатель проходимости составляет 20 единиц, а для класса «Препятствие» – всегда 100.
Для наглядности на локальной карте рабочей зоны ячейки окрашены в разные цвета в соответствии с распознанными классами (рисунок 2).
Для наглядности на локальной карте рабочей зоны ячейки окрашены в разные цвета в соответствии с распознанными классами (рисунок 2).
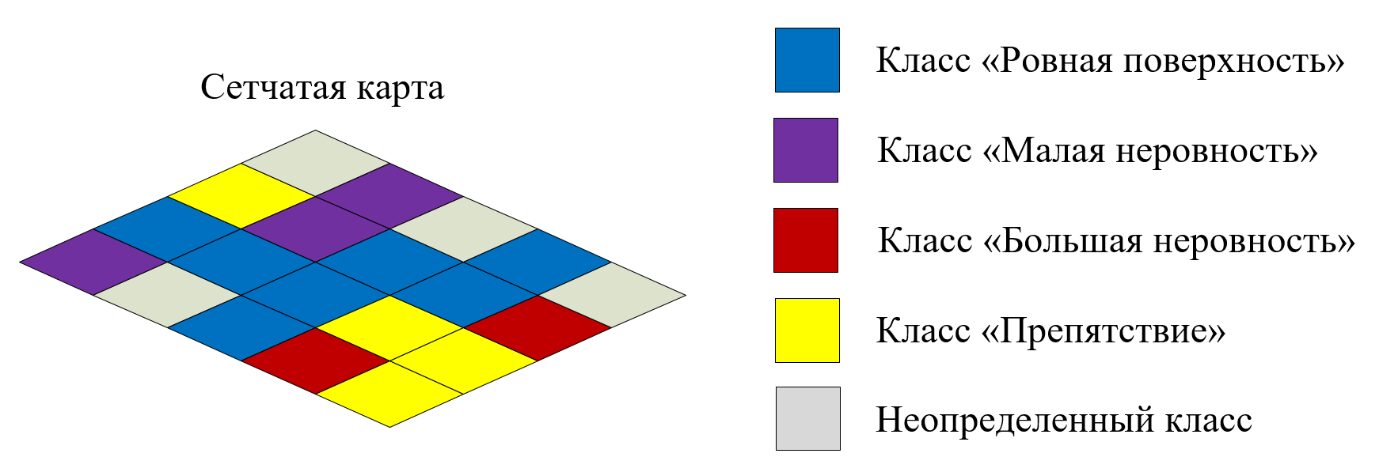
Синим цветом обозначен класс «Ровная поверхность», сиреневым – «Малая неровность», малиновым – «Большая неровность», желтым – «Препятствие». Ячейкам карты, в которых классификация по каким-либо причинам не выполнялась (например, из-за отсутствия достаточного количества точек), присваивается неопределенный класс. Такие клетки окрашиваются серым цветом.
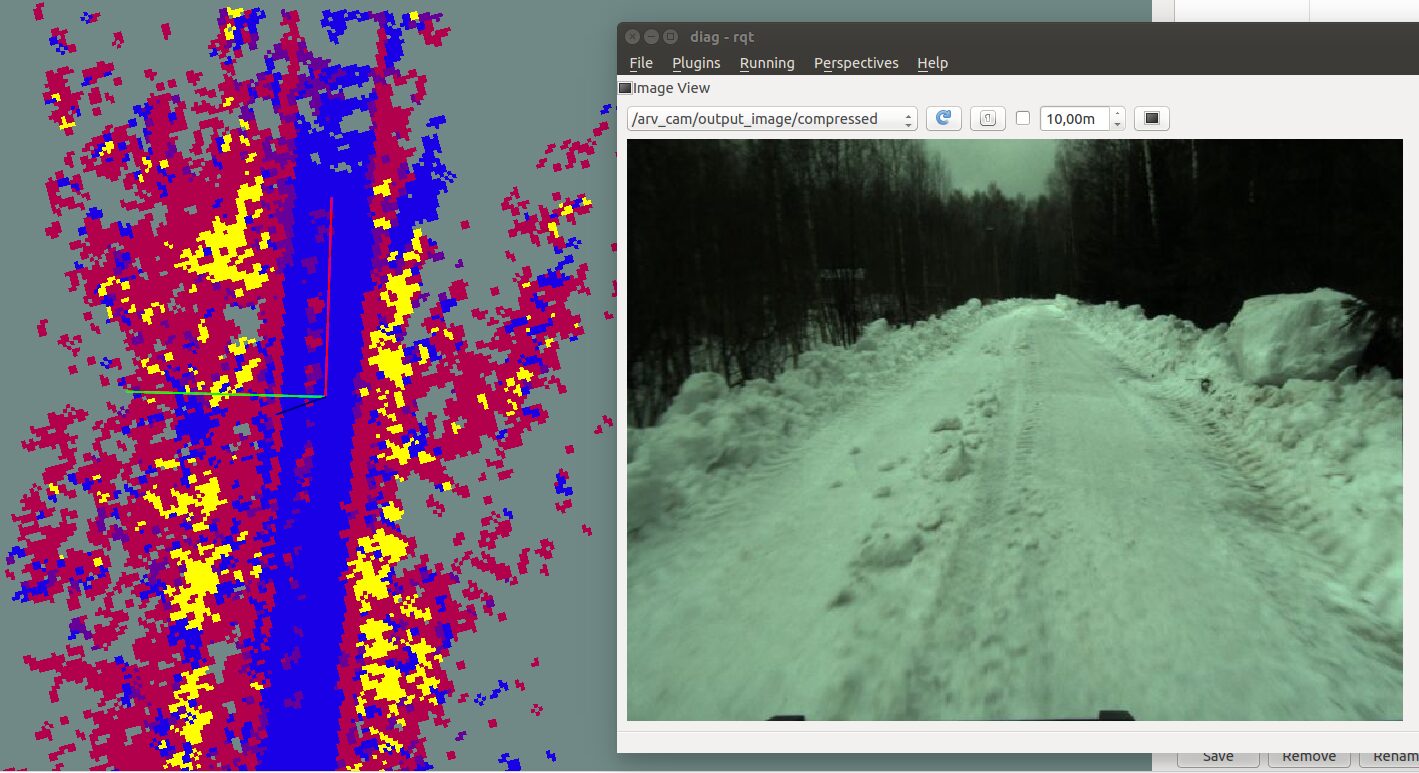
Точность классификации и размеры детектируемой зоны зависят от плотности анализируемого облака точек. С увеличением расстояния между датчиком и детектируемым объектом плотность получаемого облака снижается.
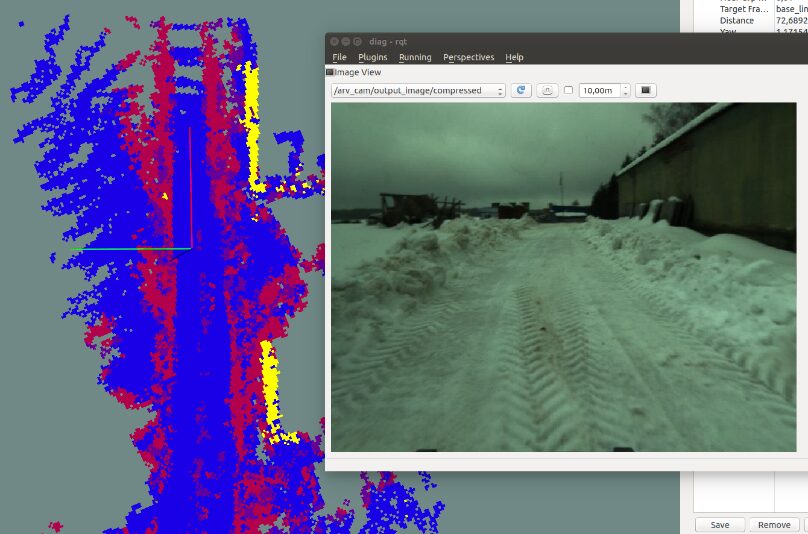
Примеры классификации рабочей зоны мобильного робота с помощью анализа облака точек приведены на рисунках 3 – 6. На изображениях показана карта, на которой четко отображена дорога, что соответствует классу «Ровная поверхность». Также класс «Ровная поверхность» присваивается заснеженным равнинным участкам. Сугробы по бокам дороги классифицированы как «Большая неровность», небольшие комья снега и колея классифицированы как «Малая неровность», деревья, кусты и здания – как «Препятствие».
Точность классификации и размеры детектируемой зоны зависят от плотности анализируемого облака точек. С увеличением расстояния между датчиком и детектируемым объектом плотность получаемого облака снижается.
Примеры классификации рабочей зоны мобильного робота с помощью анализа облака точек приведены на рисунках 3 – 6. На изображениях показана карта, на которой четко отображена дорога, что соответствует классу «Ровная поверхность». Также класс «Ровная поверхность» присваивается заснеженным равнинным участкам. Сугробы по бокам дороги классифицированы как «Большая неровность», небольшие комья снега и колея классифицированы как «Малая неровность», деревья, кусты и здания – как «Препятствие».
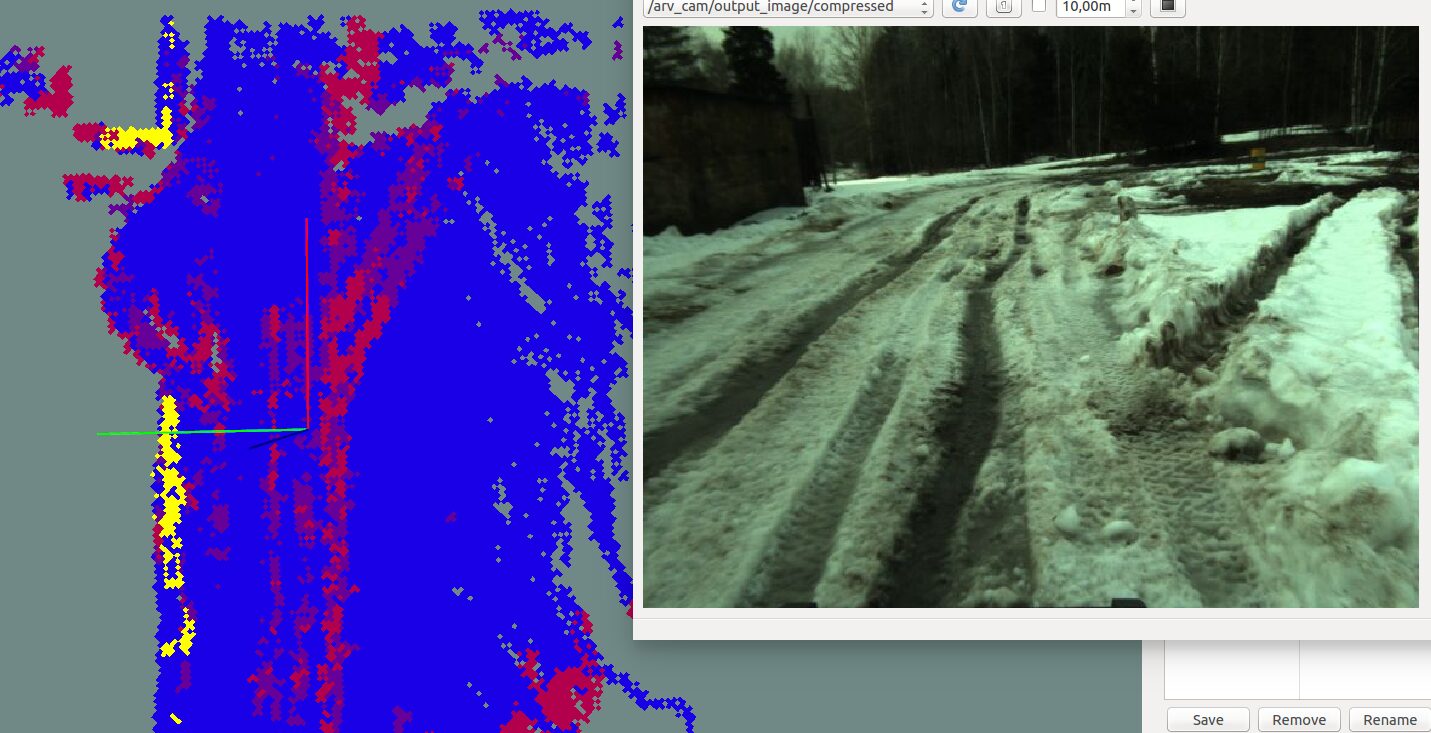

Достоинством рассмотренного способа классификации рабочей зоны мобильного робота по сравнению с методами, основанными на анализе видеоизображения, является широкий диапазон условий эксплуатации. Классификатор успешно работает в различных условиях, в том числе зимой и в сумерках, но при этом имеет ограничения при наличии естественных шумов, таких, как дождь, снег.